RaspberryPi es una placa (SBC) de bajo coste desarrollada en Reino Unido por la Fundación Raspberry Pi, con el objetivo de estimular la enseñanza de ciencias de la computación en las escuelas. El diseño incluye un chip Broadcom BCM2835, que contiene un procesador central ARM a 700 MHz, un procesador gráfico (GPU) , y 512 MB de memoria RAM .El sistema operativo soportado por la fundación es Raspbian una distribución basada en Debian sobre la que hemos trabajado en Minirobots.

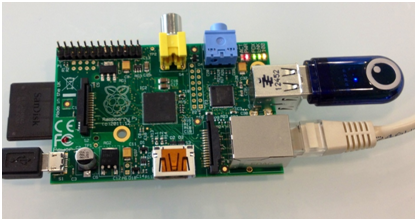
Desde el equipo de Moway Robot hemos desarrollado la aplicación Moway-Scratch para poder desarrollar programas utilizando el Robot Moway, la Raspberry Pi y Scratch. En esta entrada vamos a detallar la instalación paso a paso y las posibilidades de esta nueva herramienta. Los materiales necesarios son una Raspberry PI con todos los accesorios necesarios (fuente de alimentación, tarjetas SD, ..) y un Kit Moway + Scratch.
En nuestra página web se puede descargar la guía de prácticas Moway + Scratch con las todas las posibilidades y prácticas guiadas.
Introducción
El robot mOway se controla desde el entorno Scratch por medio de comandos. Un comando es una orden que escribimos en Scratch y que enviamos al robot. Cuando el robot recibe esta orden, realiza la acción ordenada. Por ejemplo, si queremos que el robot avance, tenemos que escribir el comando “adelante” en Scratch. Cuando ejecutemos este comando, el robot recibirá esta orden y sus ruedas se activarán.
Por otra parte, el robot mOway tiene en su interior diferentes sensores. Un sensor es un dispositivo electrónico que sirve para medir las condiciones del lugar donde se encuentra.Por ejemplo, sensores de obstáculos para detectar objetos delante del robot, sensor de luz para detectar si es de día o de noche, sensor de temperatura, etc. El robot Moway está continuamente enviando el valor de sus sensores al entorno Scratch.

Tanto el envío de comandos como el envío de los valores de los sensores se realizan por medio de radiofrecuencia (RF). El robot mOway y el entorno Scratch intercambian mensajes de forma inalámbrica. La gestión de estos mensajes se realiza por medio de la aplicación “mOway Scratch”, que hace de conexión entre Scratch y el robot Moway.
Instalación
En primer lugar debemos arrancar nuestra raspberry PI y una terminal (LXTerminal). Es recomendable actualizar el sistema para tener todas nuestros programas al día. A continuación descargamos el paquete .deb de Moway Scratch y lo instalamos en el sistema. Para ello en la terminal escribimos los siguiente comandos.
pi@raspberrypi ~ $ sudo apt-get update
pi@raspberrypi ~ $ sudo apt-get upgrade
pi@raspberrypi ~ $ wget http://moway-robot.com/mowayscratch_1.0_armhf.deb
pi@raspberrypi ~ $ sudo dpkg -i mowayscratch_1.0_armhf.deb
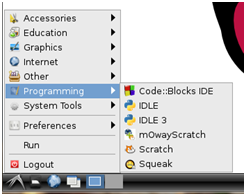
Una vez instalado podemos abrir mOwayScratch desde el menú en la sección Programming o Education. Una vez ejecutado mOwayScratch se nos creará una carpeta en /home/Documents/Scratch Projects/MowayRobot con algunos proyectos de ejemplo y las prácticas de la guía Scratch comentada anteriormente.

{kind=link}
Para que la comunicación entre Scratch y Moway funcione debemos programar el Robot Moway. Por lo tanto conectamos el robot Moway a través del puerto USB de la Raspberry PI y pulsamos el botón Programar. Moway quedará programado con el firmware necesario . La ventana de canal en el lado izquierdo nos permitirá seleccionar el canal de RF y por tanto evitar que tengamos interferencias entre varios robots trabajando a la vez. Esta operación sólo es necesario realizarla la primera vez o cada vez que queramos cambiar de canal de radiofrecuencia.
NOTA: Como la Raspberry tiene un límite de 100mA en el puerto USB es recomendable utilizar un HUB USB alimentado para cargar el Robot.
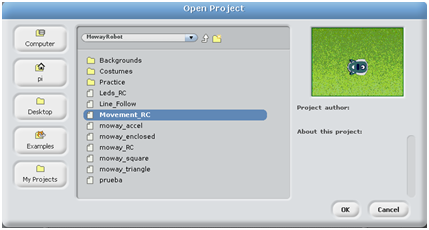
Una vez programado el robot abrimos Scratch y pulsamos File Open y en la carpeta MowayRobot tendremos una lista con proyectos, disfraces y escenarios para trabajar con Moway. En la carpeta Practice tendremos los ejercicios de la guía Scratch Moway comentada anteriormente. Seleccionamos el proyecto Movimiento_RC.
A continuación conectamos el RFUSB de Moway

y con el Robot Moway encendido pulsamos “Connect to Channel”.
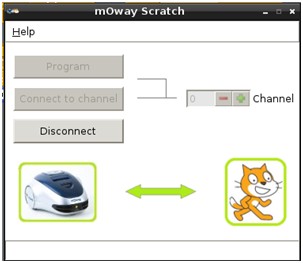
Las imágenes de Moway y Scratch se pondrán en con un recuadro verde así como las flechas, si la conexión es correcta. Una vez establecida la conexión podemos minimizar esta aplicación que funcionará en segundo plano de interfaz entre Moway y Scratch.
Volviendo a Scratch en la práctica de Movimiento RC Moway actúa como un coche de Radicontrol. Cuando pulsamos la tecla adelante Moway avanzará, con las flechas izquierda y derecha, Moway realizará un giro de 90 grados y con la flecha atrás Moway se detendrá.

A continuación recomendamos descargar el Cuaderno de prácticas Moway + Scratch para estudiar todas las posibilidades de Moway. En este vídeo también se muestran algunas de las aplicaciones.